
Nella robotica, un end effector è un dispositivo o uno strumento collegato all'estremità di un braccio robotico dove sarebbe la mano. L'effettore finale è la parte del robot che interagisce con l'ambiente. La struttura di un end effector e la natura della programmazione e dell'hardware che lo guida dipendono dall'attività che il robot eseguirà.
Nella produzione, un braccio robotico può ospitare solo determinate attività senza modifiche all'hardware ausiliario e / o alla programmazione del suo dispositivo di elaborazione finale. Se un robot deve raccogliere qualcosa, un tipo di mano robotica chiamata pinza è l'effettore finale più funzionale. Se un robot deve essere in grado di serrare le viti, tuttavia, il robot deve essere dotato di un attuatore finale in grado di ruotare.
Gli effettori finali utilizzati nella produzione includono:
- sensori anticollisione
- Spazzole
- macchine fotografiche
- utensili da taglio
- trapani
- pinze
- magneti
- Sanders
- cacciaviti
- pistole a spruzzo
- ventose
- pistole di saldatura
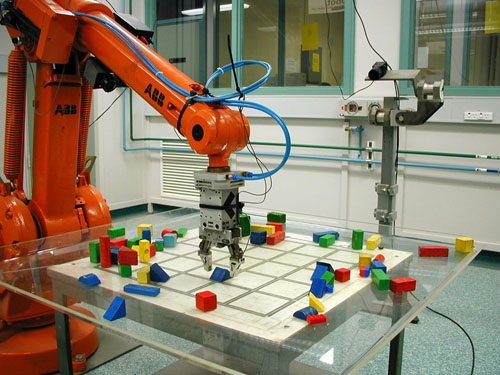
L'end effector su questo robot industriale ABB è chiamato pinza.
Vedi anche il sistema occhio nella mano e il piano di movimento.